Photo Taken On Study Abroad in Romanian Underground Hydroelectric Plant
Latest Project Updates
{{ specific_post.title }}
{{ specific_post.date | date: "%B %d, %Y" }}
{{ specific_post.excerpt }}
{% else %}No post found with the specified title.
{% endif %}{{ latest_post.title }}
{{ latest_post.date | date: "%B %d, %Y" }}
{{ latest_post.excerpt }}
Read MorePhoto Taken On Deployment in León Mexico
Portfolio


Education
Undergraduate
Mechanical Engineering
Honors College
Rigorous Classes and Research
Robotics Research
SLAM and ROS for Planogram Compliance
Undergraduate Thesis
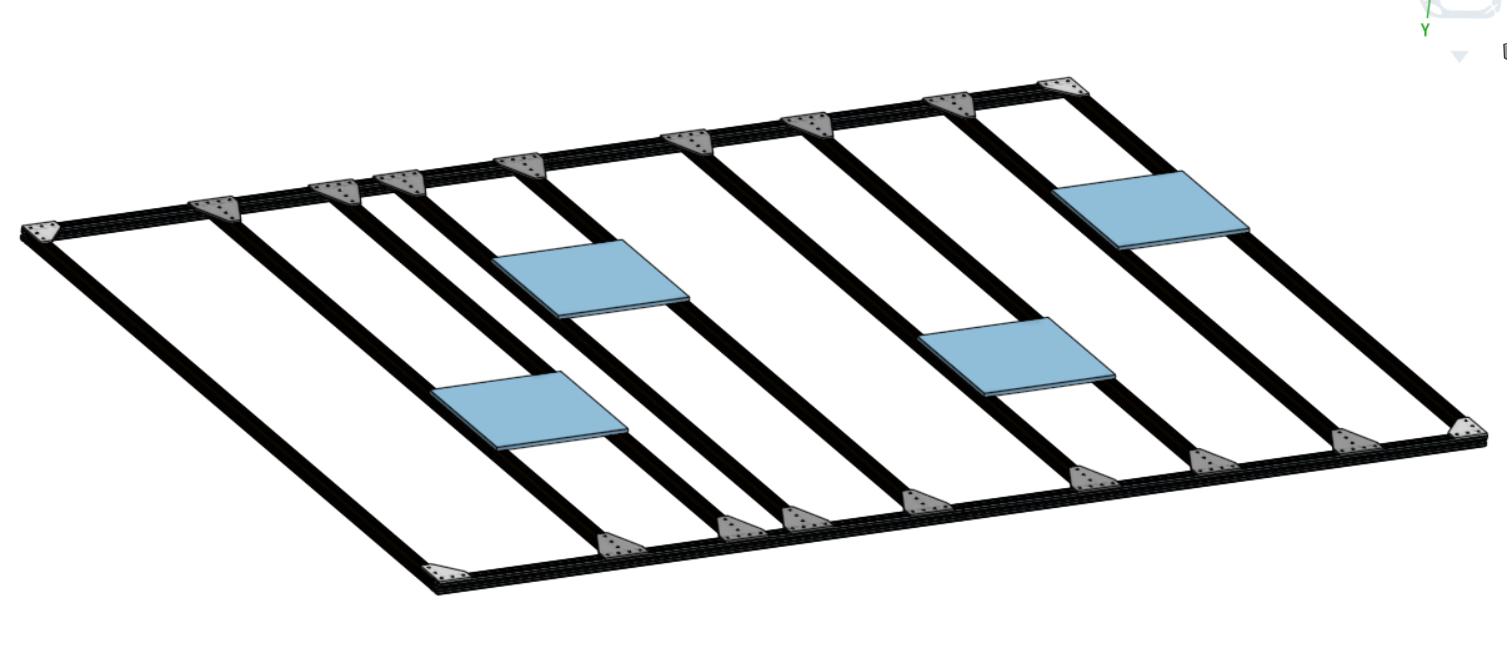
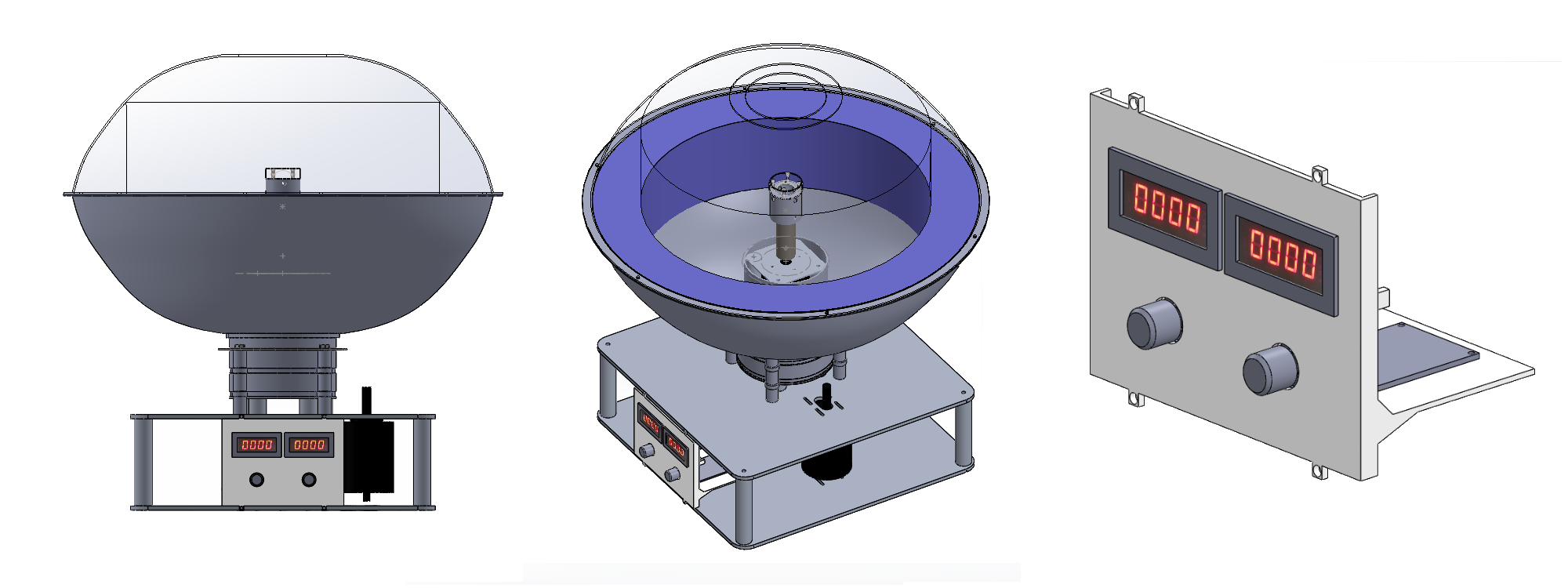
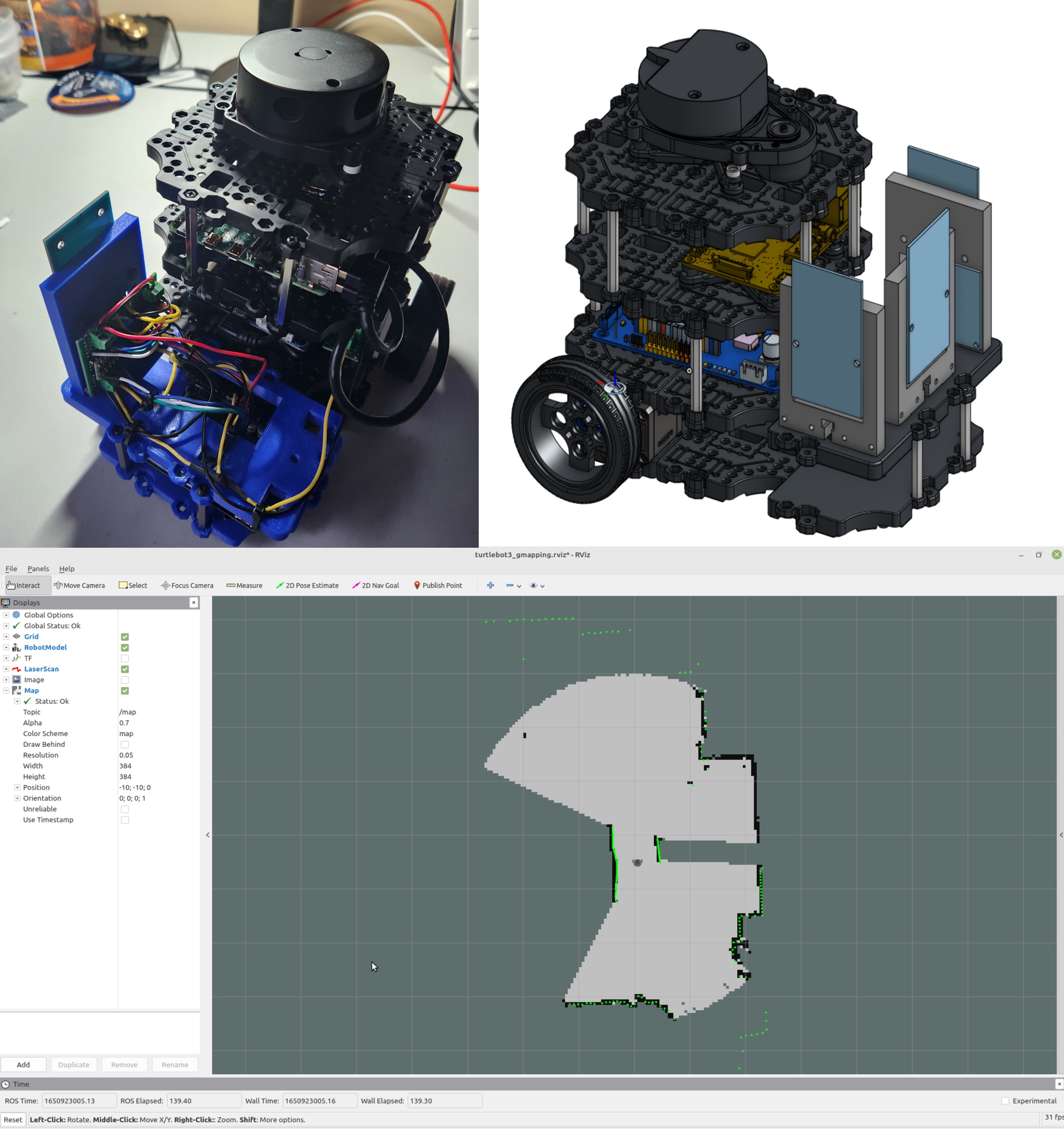
During my undergrad at Georgia Southern University, with the help of my faculty mentor Dr. Alba Flores, I independently pursued robotics research. In reflection, my work was a tremendous amount of self study and literature review but was fundamental to fostering my passion for robotics and in giving me a solid foundation for growth. Through published works, online resources, and textbooks, I was able to teach myself about ROS1 and ROS2 architecture, how a complex system can be discretized, and extensively about Simultaneous Localization and Mapping.
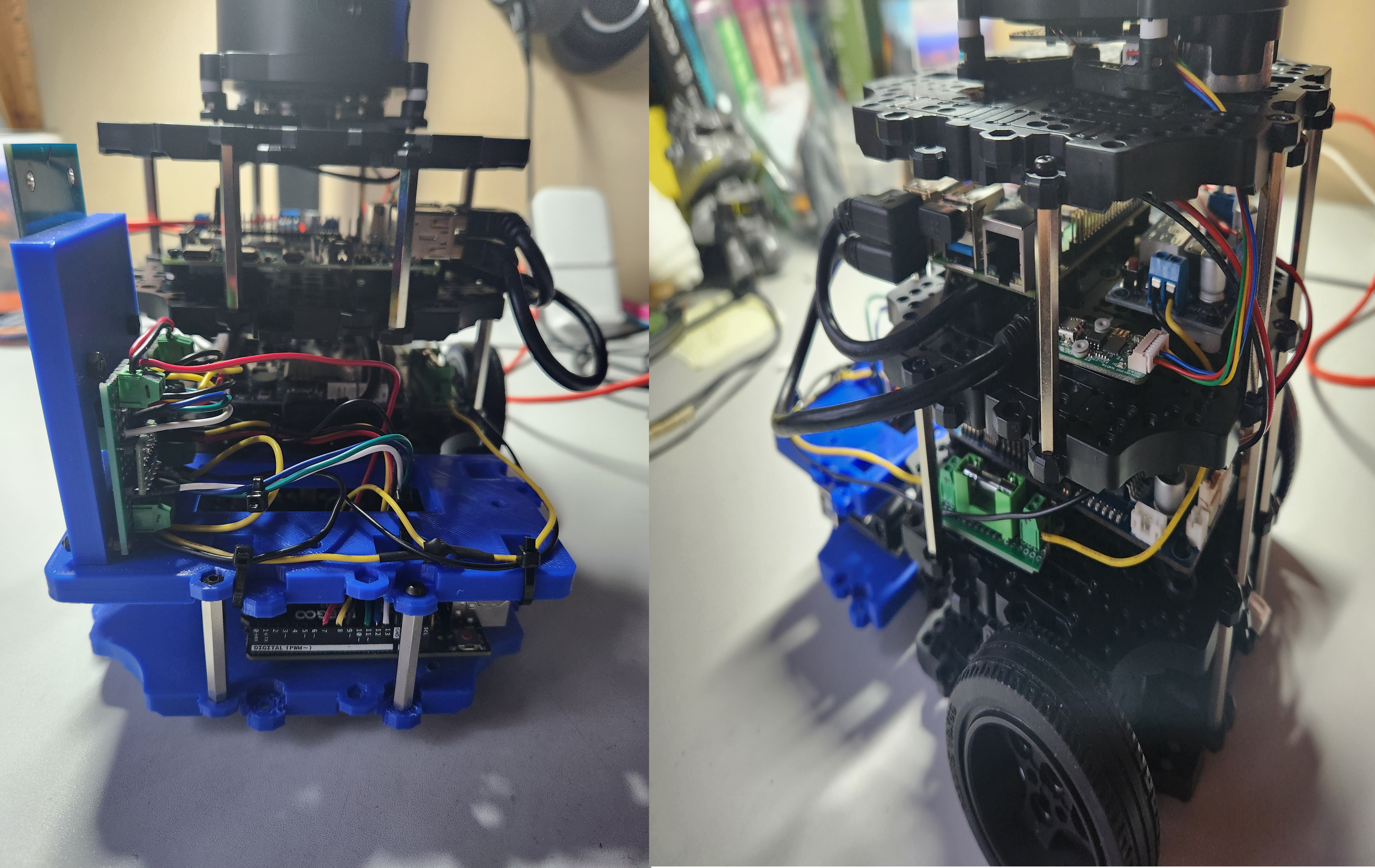
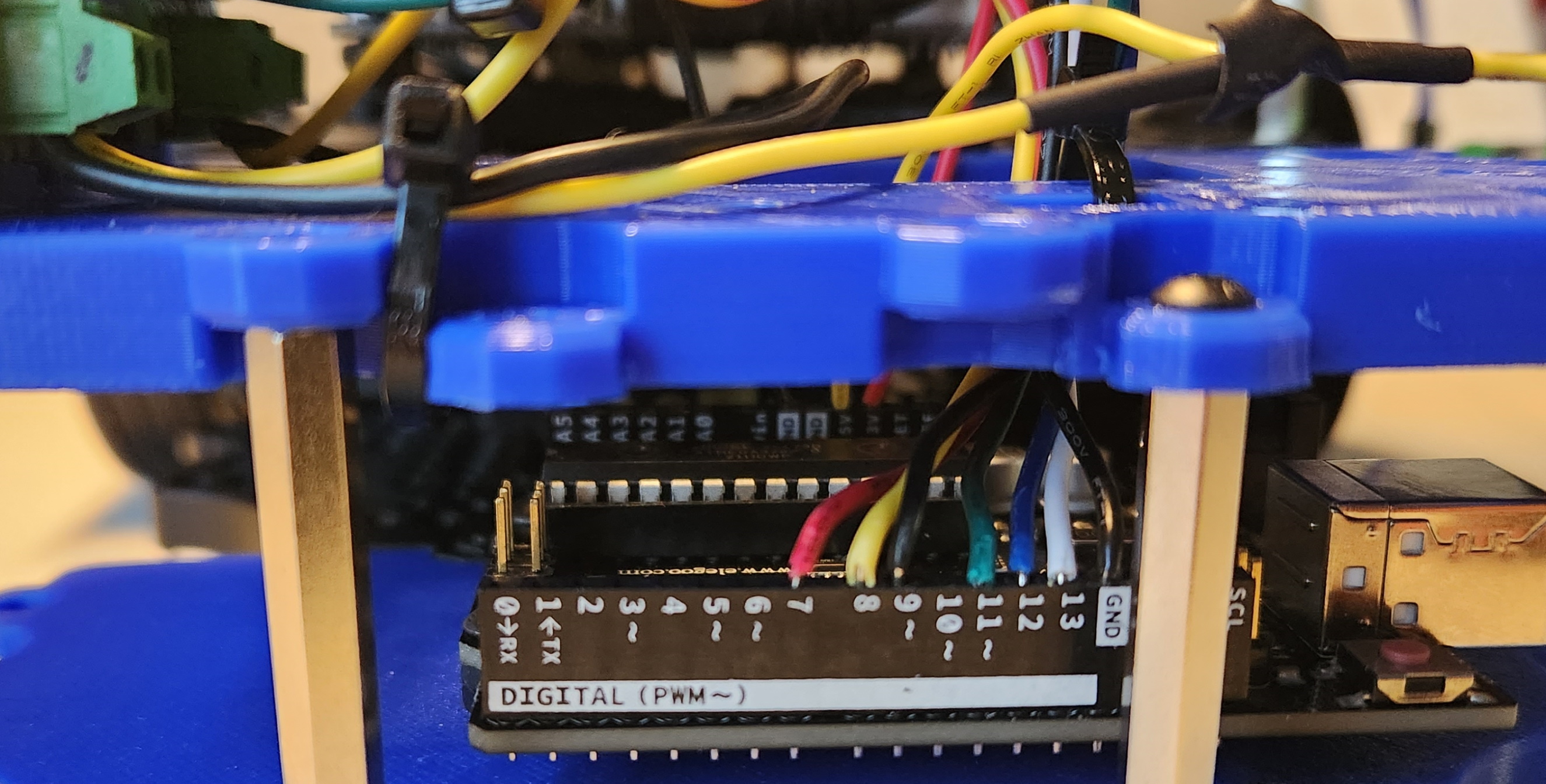
As can be seen in my work below, using a Turtlebot3 system, I fabricated an experimental assembly to integrate PN5180 NFC/RFID reader data into the turtlebot's control system. By the conclusion of my studies, I had completed the experimental assembly with detected RFID tag IDs being published to a ROS topic, and had validated this collection with a small script of motion prompted by specific IDs. I would like to perform more work focused on this field, pertaining to visual SLAM methods, integration of LLM and object recognition, and higher level AI and and machine learning topics.
Photos and videos of the project can be seen in the portfolio section above.
Career
-

January 2021 - April 2021
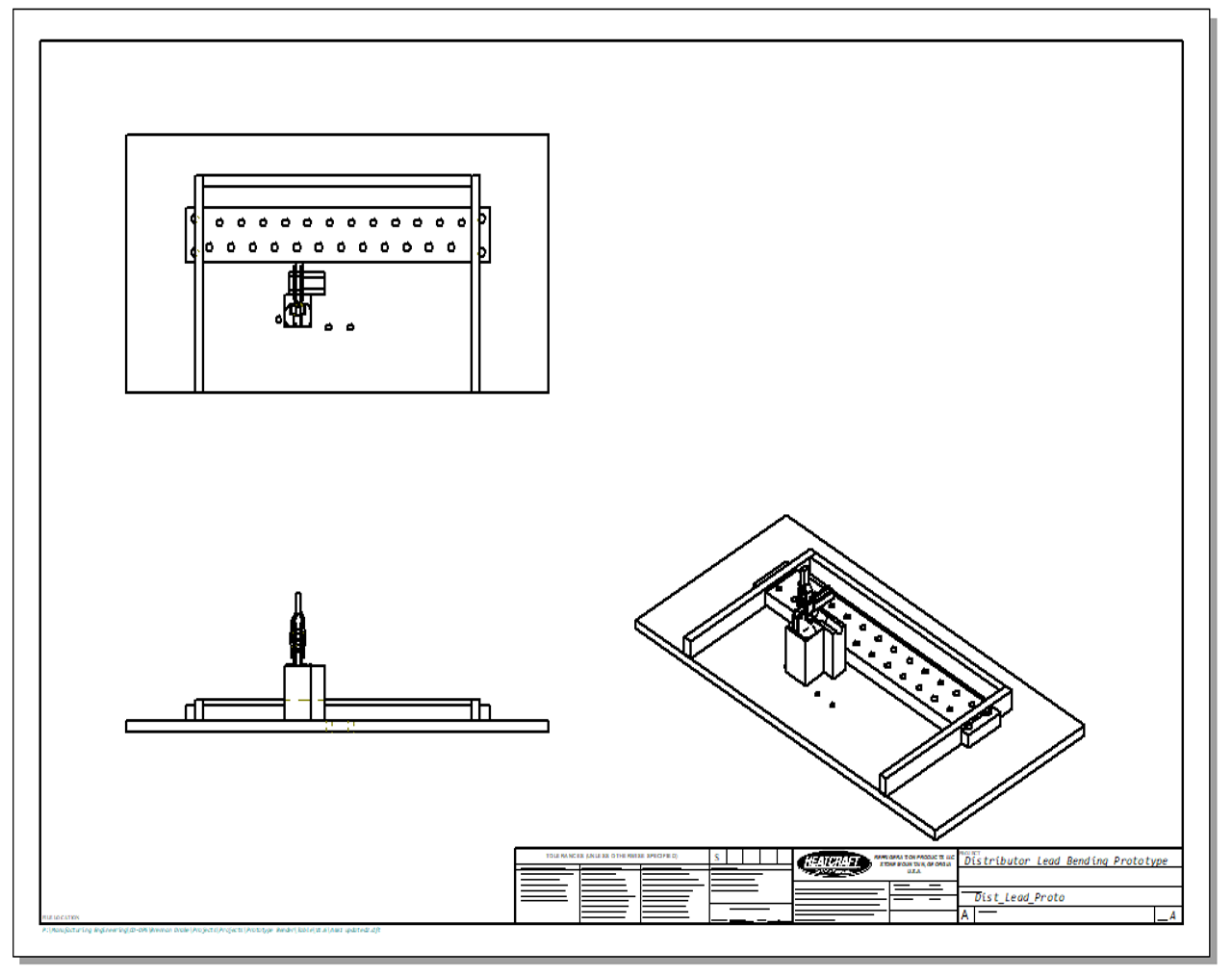
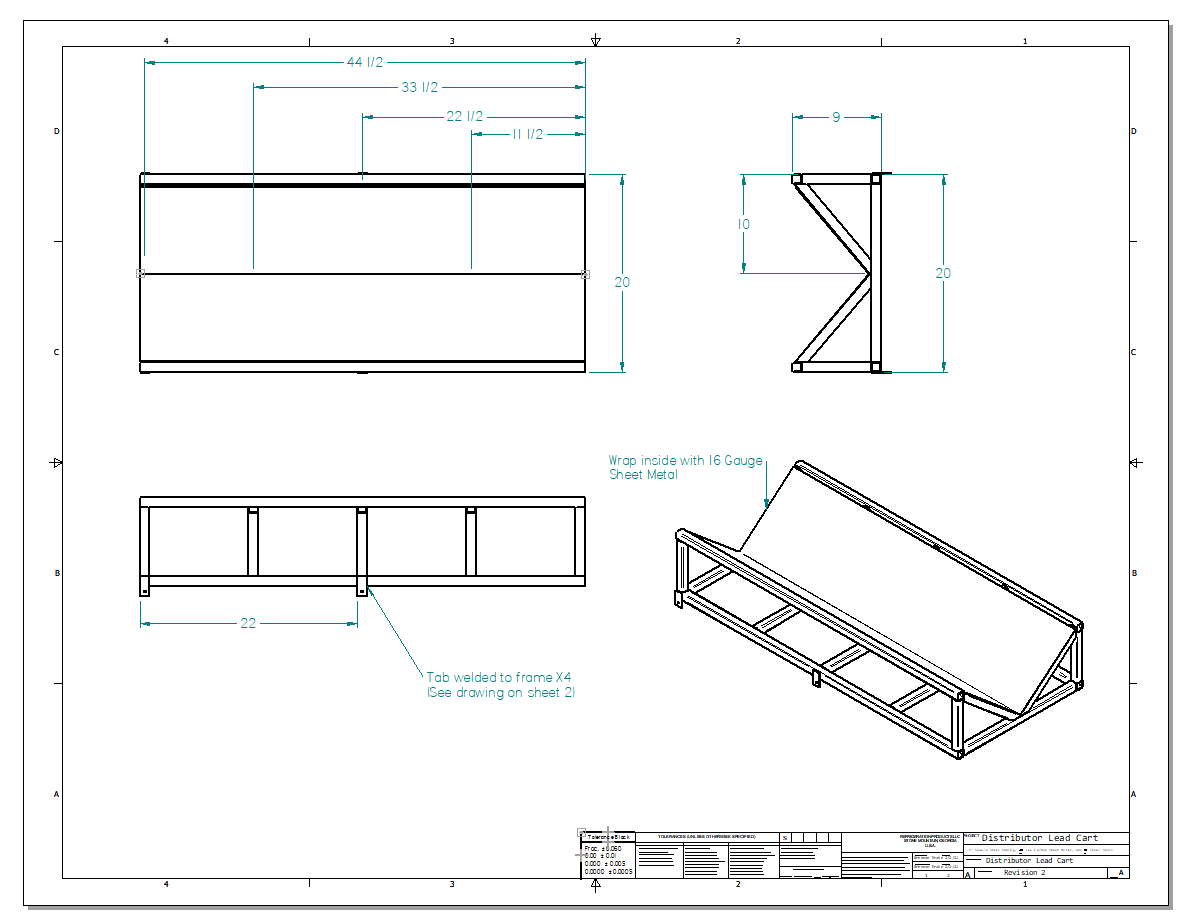
Manufacturing Engineer
Heatcraft Refrigeration Products
Working as a Manufacturing Engineer in a high volume production environment, I was able to gain exposure to process improvements and continuous improvement work. I primarily helped to design and implement improvements around the plan that would increase productivity, safety, and quality.
-

August 2021 - December 2021
Systems Safety Engineer
Gulfstream Aerospace
One area I grew working as a Systems Safety Engineer was in reading comprehension of technical documentation. Systems Safety Engineers are responsible for making sure that every step of validation, verification, and certification of aircraft systems are documented and thoroughly assessed by the appropriate subject matter experts. I was able to contribute to certification of aircraft by taking responsibility for the lighting system which entailed drafting and/or developing System Safety Assessment, Fault Hazard Assessment, and Fault Tree analysis documents.
-
May 2022 - August 2022
Adv. Materials Lab Engineer
Gulfstream Aerospace
The advanced materials lab at Gulfstream is responsible for producing shop-aids, prototypes, and experimental test rigs for use around the organization that cannot be produced by other means. In this role, I was able to gain exposure to a variety of different additive manufacturing technologies operation, maintenance, and innerworkings while continually working to make the lab more efficient, safe, and productive.
-

May 2023 - Present
Robotics Deployment Engineer
Wheel.me
Wheel.me is the first robotics company that produces a product allowing customers to turn existing infrastructure into an autonomous mobile robot. As a deployment engineer, my role is to install our solution in customer sites and to be the final point in the feedback loop for development of the product.